|
SYBERA's task is the development of real-time extensions for Windows, network solutions and fieldbus
communication. SYBERA develops real-time products based on X-Realtime technology for industrial control technology (eg.
EtherCAT,
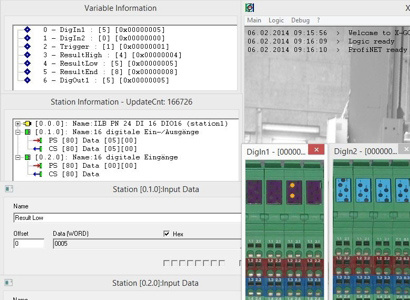
ProfiNET,
Ethernet/IP,
SERCOS III,
GigE Vision).
The stand-alone training center offers developers seminars
on system software (kernel device drivers, fieldbus and integration), real-time control and fieldbus communication for
Windows operating systems. The company has modern training facilities and offers both internal and external training.
With products for real-time programming, we offer our customers an efficient alternative in order to be able to
implement hardware controllers and diagnostic applications with little effort. The basis of the products is the
real-time extension X-Realtime. With the real-time extension for Windows
SYBERA offers access to hardware under Windows
directly from the application level. The real-time engine opens up a new dimension of real-time processing under
Windows. Support for multiprocessor platforms significantly improves real-time performance and increases overall
performance. The real-time engine exclusively reserves a physical or logical processor for real-time operation. The
real-time engine works with an asynchronous decoupling of the existing operating system, which eliminates the scheduler
between real-time expansion and the operating system. Although different BIOS configurations are now being used on
multiprocessor platforms, the new real-time engine adapts to them automatically.
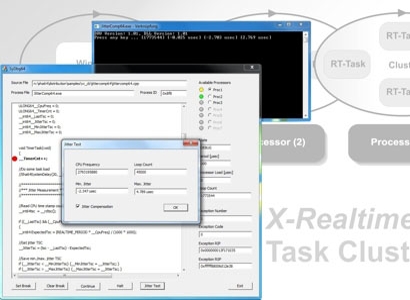
Especially with the critical platform - CPU combinations of notebooks, the real-time extension shows its strengths.
SYBERA relies on a 3-element jitter reduction process: adaptive jitter compensation, active CPU power management,
platform control. Depending on the platform, jitter of less than 10 microseconds can be demonstrably achieved by
combining all three methods. On desktop platforms even a jitter of less than 3 micro-seconds is reached stably. Each
processor core can be operated as an independent task cluster. This allows e.g. the parallel operation of multiple
fieldbus systems, redundant Ethernet topologies, or the parallel operation of stand-alone drive controllers. Typical
applications of the new real-time engine are: machine controls, service management, diagnostic systems, fieldbus
controllers, automotive applications, sensors, optical systems. As with the 32-bit real-time engine, the 64-bit
solution also allows the complete programming of resources such as IO-Space, MappedMemory and DMA of all PC components
both internal hardware (eg legacy), as well as peripheral adapters (eg PCI , PCIe, PCMCIA, etc). An independent
resource enumerator has been developed for programming Plug & Play components. The programming of real-time tasks, the
control of hardware components, as well as the programming of Windows routines occurs together within the same
development environment (e.g., VisualStudio) as an application. The data exchange can be carried out via shared,
synchronized memory areas. The real-time software is installed in one operation - without complicated Windows settings.
For a quick start, the software SYDBG is available - a control system for all available processor cores, as well as the
display of status information. In addition, the software offers the possibility of source code debugging for real-time
tasks. With the additional module for jitter analysis, SYDBG enables comprehensive monitoring of the real-time engine.
SYBERA also offers consulting services for embedded integration and special driver solutions. Benefit from SYBERA's
consulting services, from the simple port control under Windows to the complex NDIS Intermediate driver with a wide
variety of function groups. Our specialists work together with the customer to develop specifications and checkpoints
for the optimal implementation of projects and an optimal price / performance ratio.
|