The Ethernet/IP Scanner for Windows from SYBERA is a powerful
software library for implementing industrial Ethernet/IP controls
without separate hardware controllers like PLC systems.
In combination with the X-Realtime Engine,
the solution enables real-time control directly from the PC via standard Ethernet adapters
(e.g., Intel or Realtek).
With the Ethernet/IP Library, developers can program and graphically design
individual control applications. The clearly structured
API functions allow projects to be implemented, configured, and parameterized efficiently.
The integrated Ethernet/IP protocol management handles tasks such as
data logistics, connection management, and diagnostics. Developers can concentrate on
payload processing, while the protocol stacks act as a bridge between the
physical transport layer (e.g., Ethernet driver) and the application software.
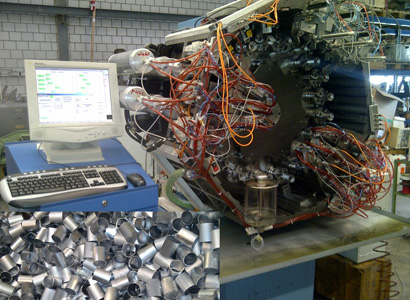
The software runs under Windows and enables real-time control of
Ethernet/IP modules – ideal for industrial automation projects.
Ethernet/IP Master – Functionality
Ethernet fieldbus communication differs in its
protocol specification and topology. Ethernet/IP uses a star topology,
while EtherCAT uses a ring topology.
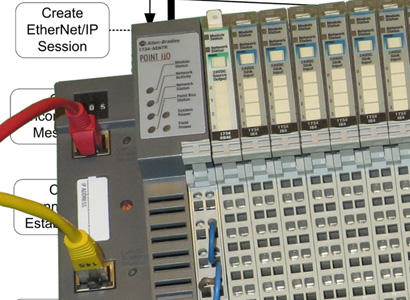
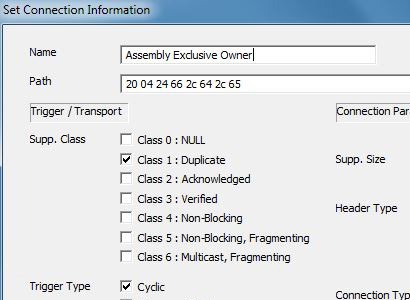
The cyclic communication is based on a defined
Master/Device relationship, described by "Connections".
With SYBERA's real-time Ethernet/IP Master, separate control hardware is eliminated.
The Ethernet/IP control is implemented directly on the PC with standard network adapters.
The system provides deterministic communication and is available as a library for
developers who want to control Ethernet/IP devices in real-time.
Ethernet/IP Master – Technology
Due to the increasing networking of industrial systems,
Ethernet communication gains central importance for automation solutions.
Real-time Ethernet standards such as Profinet, EtherCAT and
Ethernet/IP exist for fieldbus communication.
The communication principle is based on a deterministic process data exchange between
Controller and Devices. This requires a deterministic software architecture and
corresponding hardware. Only with the introduction of modern real-time extensions, such as the
X-Realtime Engine developed by SYBERA, has the direct
control of fieldbus devices under Windows in real-time become possible.
Ethernet/IP – Live Demonstration with Microsoft Teams
SYBERA offers an exclusive live demonstration of the Ethernet/IP Master via Microsoft Teams.
This interactive presentation gives developers and interested parties deep insight into the system and its functionalities.
Participants can experience the processes, station management, real-time performance, and control options in a practical way.
The goal of the live demo is to get to know the SYBERA Ethernet/IP Master better and to realistically assess its performance.
This allows developers to make informed decisions and optimally evaluate the system's potential applications. Interested parties are welcome to
schedule an individually agreed-upon appointment with us.