The real-time extension SHA for Windows opens up new possibilities in real-time automation.
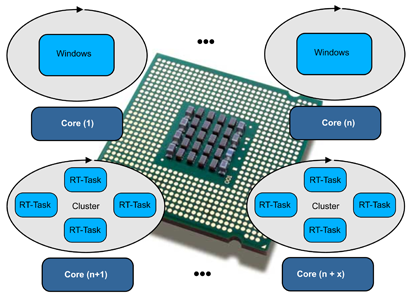
The ability to operate individual processor cores completely decoupled from Windows as real-time systems
achieves previously unrivaled determinism. The extremely precise jitter behavior
(< 10 µs, depending on the platform) allows for the development of highly accurate control and automation applications.
Each processor core can be operated as an independent
Task Cluster (PDF) with
real-time scheduling – both as a Timer (SingleShot) and in periodic operation.
This allows, for example, multiple control systems, redundant Ethernet topologies
or parallel drive controllers to be executed simultaneously.
The real-time extension is based on the asynchronous
X-Realtime Technology (PDF),
which forms the foundation of all SYBERA real-time libraries. It enables the development
of powerful applications for the direct control of hardware resources – without additional hardware.
The X-Realtime-Engine runs natively under
Windows
and implements real-time multitasking with cycle times down to 10 µs with minimal jitter.
Due to its multi-processor capability, the Engine is ideal for complex application
and driver projects. Developers work within their familiar
environment (e.g., Visual Studio): real-time tasks, hardware control
and Windows routines can be implemented in a single application.
Data exchange between the real-time system and Windows occurs via
synchronized memory areas.
As with the 32-bit version, the 64-bit variant also allows the complete real-time programming
of resources such as IO-Space, Mapped Memory
and DMA for all PC components – both internal hardware (Legacy) and peripheral adapters
(PCI, PCIe, PCMCIA etc.). A dedicated resource enumerator has been developed for Plug & Play components,
enabling direct real-time access to hardware resources
from the application layer.
Installation is done in a single step – without complex Windows configurations.
The tool SYDBG is available for monitoring and analysis,
which offers real-time control of all processor cores and displays state information.
Additionally, it enables source-code debugging for real-time tasks.
With the optional Jitter Analysis Module, SYDBG provides comprehensive
monitoring and optimization of the Real-Time Engine.
Typical fields of application are in measurement, control,
and communication technology, where the highest data rates and minimal reaction times
are required. The SYBERA Real-Time Extension for Windows is the ideal solution
for deterministic real-time controls and precise process automation.
|