Sercos III Master for Windows
|
Realtime Controller Stack
Programming Library
|
|
Manual
|

|
| |
Download Software
|

|
| |
Request Further Information
|

|
| |
Call
|

|
| |
| |
- Intelligent Station Management
- Station Realtime Cycles up to 500 usec
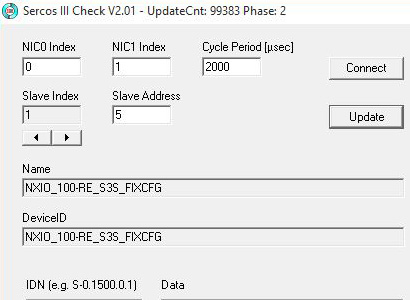
- Fixed and Variable Configuration
- IDN Management
- Line or Ring Topology
- High-/Low-Level Interface
- Error Management
- Diagnostics
- Profile Management
- Phase Management
|
|
Additional Tools
|
|
|
Sercos III Configurator with Diagnostics
|
Typical Applications
|
| |
- Assembly
- Packaging
- Sawing Technology
- Service
- Measurement Technology
- Welding Technology
|

|
Worth Knowing ...
|
SERCOS III Master – Realtime Library for Windows
|
|
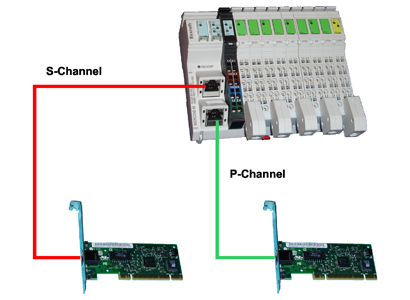
With the PC-based SERCOS III Master for Windows and the Sybera X-Realtime Engine, the need for a separate controller hardware is eliminated. The master control is realized directly via standard Ethernet adapters – with sampling rates below 100 µs. Due to the extension of the Ethernet transport layer (Ethernet Realtime Core), more than 70 commercially available Ethernet adapters are now supported. This means that almost every standard Ethernet card can be upgraded to a powerful SERCOS III Master. The software runs natively on Windows and enables the real-time control of SERCOS III slaves. Depending on the PC hardware and application, telegram update times of up to 500 µs are achievable.
|
SERCOS III Master – Functionality
|
|
The SERCOS III Master from SYBERA is provided as an open real-time library system and enables the deterministic programming of SERCOS III devices. Developers can implement control projects via intuitive interface functions and design their own applications graphically. A flexible IDN parameterization system allows efficient configuration of device settings and logical links. The complete protocol management, including error handling, state transitions, and device handling, is integrated into the Master protocol stack. This forms the bridge between the physical transport layer (e.g., Ethernet driver) and the application software.
|
SERCOS III Master – Technology
|
|
The SERCOS III Master complies with specification 1.1.2 and is designed as an open, high-performance programming system – like all SYBERA Master libraries. The system consists of four real-time tasks for sending, receiving, and functional processing. A central state machine synchronizes all tasks. A real-time error task detects frame errors, hardware latencies, timeout events, and working counter deviations. Additionally, an emergency telegram can be stored, which is automatically sent in case of an error. A frame filter separates SERCOS telegrams close to the hardware in real-time and passes them to the telegram stack. Developers can implement the functional processing (Realtime Level 2) both at the system and application level. For this, SYBERA uses the "Dynamic Jitter Compensation" method with active and passive feedback. Despite the already low jitter of the X-Realtime Engine (approx. 15 µs, depending on the hardware), further minimization of jitter and drift was necessary for the precise control of drive controllers – this is fully implemented in the Master libraries.
|
SERCOS III Master – Live Experience in the Real-time Simulator
|
|
SYBERA offers the opportunity to experience EtherCAT, SERCOS III, and Profinet live in the real-time simulator in Bietigheim-Bissingen. The simulator combines digital and analog sensor technology/actuator technology in a complex pneumatic control system. A passenger cell can execute lifting, rolling, pitching, and rotating movements. Connected SERCOS III devices include, among others, laser distance sensors, inductive sensors, pressure sensors, incremental encoders, proportional valves, and directional valves – a realistic environment of modern automation technology. Visitors can change parameters themselves and thus directly influence jitter, repeatability, and control behavior. The real-time simulator thus enables a practical assessment of the SERCOS III and Profinet technologies.
|
|
