| |
| |
Multi-Adapter CAN Support
SJA-1000 Chip Support
PITA Chip Support
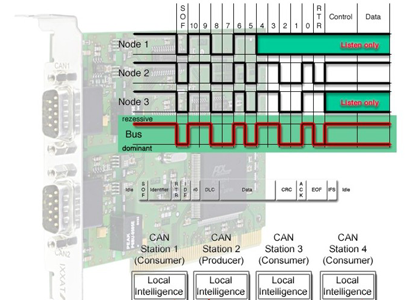
CAN Frame (11-Byte Mode)
CAN Frame (13-Byte Mode)
COM-To-CAN Interface
Core interface for CAN (Open) (Real-Time-Level1)
Core interface for CAN (Open) (Real-Time-Level2)
Priority controlled frame buffer management
True 32- and 64- bit mode
High accurate data time stamping (µsec)
|
|
|
Additional Tools
|
 |
|
SYCOMM - CAN Analyzer
|
|
Supported Hardware
|
| |
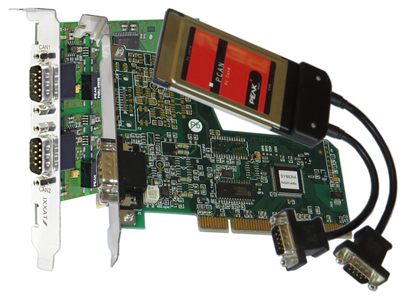
SJA1000 or PITA chips
PCI Adapters
PCIe (PCI Express) Adapter
ExpressCard/34
ExpressCard/54
PCMCIA Cardbus
|
 |
|
Real-Time CAN (Open) Library for Windows
|
|
The idea of further abstraction (real-time communication for different transport systems, such as serial
communications, Ethernet (TCP / IP) and CANBUS (...) is realized with the SYBERA Transport Libraries, the so-called
Real-Time cores. Each Real-Time core is based on the X-Realtime Engine SYBERA. The core allow both, real-time Level1
(collecting and buffering of data at real-time, without loss of data), and Real-Time Level 2 (the cyclic function
operating at real-time). The Real-Time CAN (Open) Library for Windows allows the handling of raw CAN
frames at real-time. In this case, the real-time tasks can be embedded within the application. Data exchange takes
place via a shared memory area. The Real-Time core only need simple, passive harware. One of the great advantages is
the adjustable scheduling time of incoming and outgoing data. A proprietary core interface, as well as the standard
socket interface is available for the development of real-time applications. A fixed filter management determines the
transfer direction of the CAN (Open) frames (core or COM interface) and enables the selection of individual frames. The
available header files define all, for the processing of the core interface and the real-time necessary structures. The
structural elements are combined hierarchically. The CAN Realtime Core supports all standard PCI (e) and PCMCIA adapter
from Peak System, IXXAT, EMS and SYBERA.
|
|
CAN (Open) Master Functionality
|
|
At Realtime Level 1 incoming and outgoing data are decoupled by means of RX and TX ring buffers and controlled by
forward and reverse indexing. Additional RealTime Level 2 offers the cyclical deterministic functional operation, thus
allowing the implementation of real-time protocols. Therefore, the CAN (Open) frames are retrieved in the RAW format.
RAW means that all data of the CAN (Open) frames are available for the functional operation and for the implementation
of further protocols. Depending on the PC hardware and application, Real-time cycle times up to 50 usec may be
realized. The CAN (Open) Core enables the operation of multiple adapters at the same time. For each adapter an indexed
CAN (Open) stack is created.
|
|
CAN (Open) Master Technology
|
|
The Real-Time CAN (open) Core for Windows can operate with a passive SJA1000 or PITA SJA1000 chip adapter (also
PCMCIA and PCI Express Adpater) and will be installed as a CAN device driver. When installing the CAN adapter Windows
will automatically ask for a CAN device driver to install. SYBERA uses the method "Dynamic Jitter Compensation" with
active and passive compensation within the realtime engine. Although the X-real-time Engine works with a maximum native
jitter of ca. 15 microseconds (depending on the hardware platform), it can be reduced by the dynamic compensation to
less than 3 microseconds.
|
